Created by Parsawit Deshwattanatham and Jessakorn Paopatimakorn under supervision of Professor Dr.Eng.Ryo TANAKA
Required Libraries
- pyqt5
pip install pyqt5 - pynput
pip install pynput - numpy
pip install numpy - cv2
pip install cv2 - djitellopy
pip install djitellopy - threading
pip install threading
- Setting Up Guide
- Drone Controller GUI guide
- Auto Mode Instruction
- Manual Mode Instruction
- Miscellaneous
Setting Up Guide Video : Youtube Link
1.) Download final_v6.zip

2.) Extract final_v6.zip

*** Note : Please put everything in same folder.
3.) Add Final_v6 folder into Exclusion of Window Defenders
- how to add folder to exclusion list --> Click here

*** Note : We use keylogging method to grab keyboard input to control the drone. ***
4.) Turn on Tello drone and connect to Tello drone.

5.) run main.py on any IDE.

6.) GUI will be shown right after script ran

*** IMPORTANT : TELLO DRONE MUST BE CONNECTED TO PC BEFORE RUNNING, OTHERWISE ERROR WILL OCCOURED.
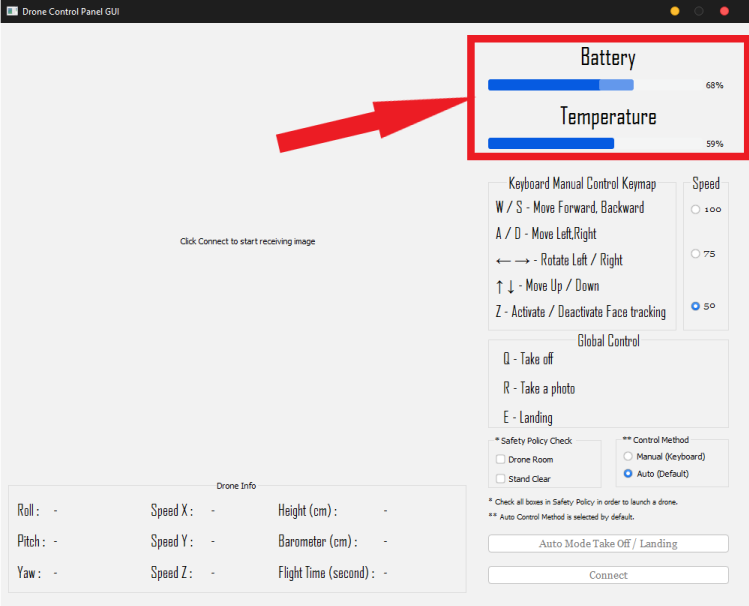
- Battery and Temperature are displayed on top-right of the GUI.
- Keymapping of Keyboard Control on Manual Mode.

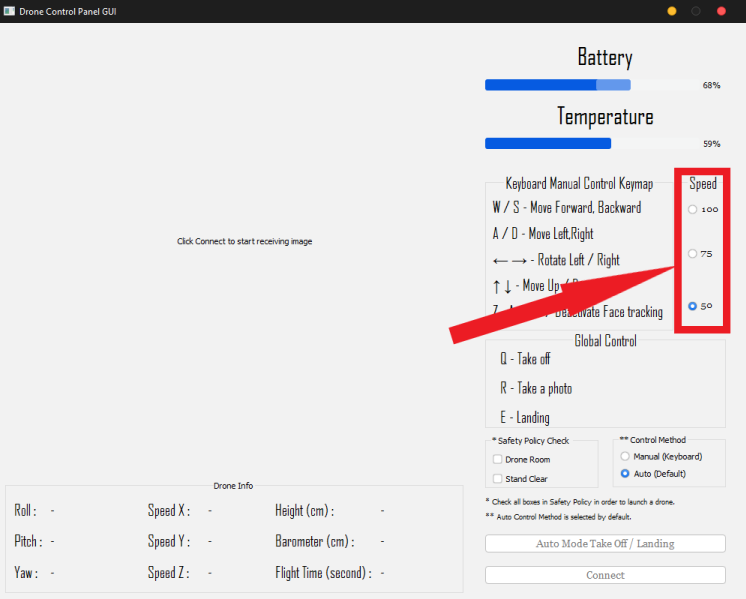
- Drone Speed Modifier on Manual Mode(50 / 75 / 100).
- Global Control of both Auto and Manual Mode.

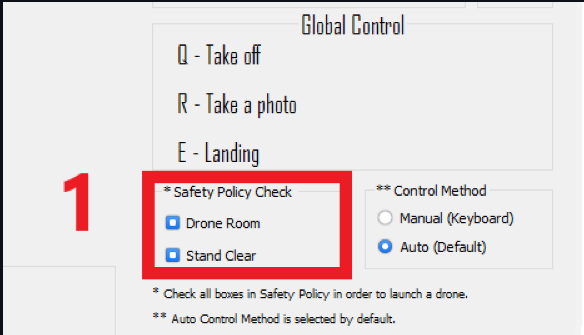
- Safety Policy Check, Must be checked in order to connect to the drone.

- Control Method, Choose the way to control the drone (Default is Auto Mode).

- Auto Take Off and Auto Landing, This only work on Auto Mode.

- Connect Drone Button, Use this to connect to drone with selected mode.

- All drone information are shown on this section.

- Drone Camera when connected are show in this section.

- To fully kill the process, you MUST kill the terminal.

- Connect to tello drone and run main.py
- Safety Check Policy must be all checked, then press connect.

- After camera are shown, click "Auto Mode Take Off / Landing" to take off

- After Drone take off, center your face at the middle of the drone camera and it will start tracking.

- To land the drone, click "Auto Mode Take Off / Landing" again to land.

- To disconnect drone, click "Connect" button again to disconnect.

- To fully kill the process, you MUST kill the terminal.
- Connect to tello drone and run main.py
- Safety Check Policy must be all checked.
- Select Manual Mode.

- Click "Connect" button to connect to the drone.

- After Connected, Use Keyboard to Control the drone. The Keymapping is shown in GUI.

- To fully kill the process, you MUST kill the terminal.
- After Captured pictures, the photo will be stored on 'Captured/'.